A1物体または粒子がその平衡位置に対して往復運動することを振動といいます。
NEWS & TOPICS

振動と速度の基礎に関するQ&A
2025.07.01
振動と速度の基礎に関するQ&A

A2振動を表す主なパラメータは、振幅、速度、加速度です。
A3振動工学の分野では、加速度は g で表すことが多いです。
国際単位(SI)で使用される単位はメートル毎秒です。1g は9.80665m/s²と定義されていますが、一般的には9.8m/s²と近似して用いられます。
A4圧電加速度計は、圧電結晶の正電圧効果を利用して動作します。つまり、圧電結晶が外力によって変形すると、結晶内部に分極が生じ、表面に電荷が発生します。外部からの力が除去されると、結晶は元の状態に戻ります。圧電結晶とマスブロックはバネによって押し付けられ、箱型の金属シェル内に設置されて圧電加速度計を形成します。
加速度計が振動や衝撃を受けると、質量ブロックは慣性により振動を発生します。衝撃は、その慣性に比例した力で圧電結晶に作用します。結晶上の電荷の変化を測定することで慣性力を測定することができ、この慣性力を通じて振動や衝撃の加速度値を測定できます。これが圧電加速度計の基本的な動作原理です。
A5変位、速度、加速度、センサはそれぞれその固有振動数(センサ固有の高調波振動数)のどの領域で動作するか、また、減衰係数の大きさはどのくらいかは、以下の通りです。
一般的な慣性センサーの場合、加速度計の動作範囲は極めて低い周波数からその固有周波数未満まで、変位センサーの動作範囲は固有周波数以上から非常に高い周波数まで、速度計は固有周波数付近で動作します。
加速度計や変位計の減衰係数は一般に 1 未満ですが、速度計の減衰係数は 1 より大きくなります。このように使用する目的は、動作周波数範囲内で振幅周波数特性と位相周波数特性が平坦であることを保証し、対応する振動値を歪みなく測定できるようにすることです。
A6加速度計で測定された加速度値をどのように考慮すればよいでしょうか
一般的に、加速度計を測定対象物に取り付けると、加速度計で測定される加速度値は、加速度計が取り付けられていない場合の値よりも小さくなります。
特殊なケースでは、加速度計の設置によりコンポーネントの共振が発生する可能性があります。この場合、測定された加速度値は予想値を大きく超えることになります。この場合、加速度計を別のモデルに交換するか、他の解決策を見つけることを検討する必要があります。
A7圧電加速度計の使用範囲(限界加速度範囲など)内で、基準感度に対するセンサー感度の偏差と、異なる加速度における基準感度の比が、加速度計の振幅直線性です。
加速度計の振幅の直線性を校正する目的は、加速度計の使用のダイナミック レンジを決定することです。たとえば、振動と衝撃の測定に使用する場合、振幅の直線性はそれぞれ ±5% と ±10% 未満である必要があると規制で規定されていますが、標準的な圧電加速度計の振幅の直線性は ±3% 未満である必要があります。
A8動作加速度計の基準感度は、指定された一連の条件 (振幅、周波数、温度、総静電容量、アンプの入力抵抗、取り付けトルクなど) 下で、動作加速度計の電気出力と取り付け面に作用する加速度の比として定義されます。
A9物体の振動を測定するには、接触型振動センサーを測定対象物に接触させるか、測定対象物に設置する必要があります。どのような設置方法でも弾力的に接続されます。センサーと測定対象物が完全に接続されて全体を形成している場合、これは物理学では剛体と呼ばれます。このとき、取り付け剛性は非常に大きく、弾性は非常に小さくなります。これが設置剛性の考え方です。
実際の設置では、設置剛性を無限にすることはできず、センサーの質量と設置の弾性によってバネ質量系が形成されます。このシステムの共振周波数が非常に小さい場合、センサーによって測定される振動には、測定対象物の振動だけでなく、センサーを取り付けるスプリング システムの振動も含まれます。つまり、センサー取り付けスプリングが共振すると、歪みが非常に大きくなります。
たとえば、圧電加速度計の一般的な取り付け方法には、手持ち接触、プラスチシン取り付け、ワックス接着、磁石吸着取り付け、502接着剤接着、絶縁ネジ取り付け、スチールネジ取り付けなどがあります。明らかに、この順序で配置された取り付け方法の取り付け共振周波数はますます高くなり、つまり、取り付け弾性はますます小さくなり、取り付け剛性はますます大きくなります。
A10加速度計の周波数応答は数百 Hz から 10 Hz 程度までフラットなので、200 Hz 以下でも使用できます。さらに下に行くと、アンプの特性が適切かどうかを検討する必要があります。アンプが良質であれば、0.5dB 下限周波数は 1Hz 未満になります。工場出荷時には、200Hz の開始点のみが与えられます。これはセンサーではなく、周波数応答デバイスの制限によるものです。
A11出力量が加速度に比例するセンサーには、圧電加速度計、サーボ加速度計、ひずみ加速度計などがあります。
出力電力が速度に比例するセンサーには、電磁センサー、速度センサー、地震計などがあります。
出力量が変位に比例するセンサーには、渦電流センサー、静電容量センサー、差動変圧器センサー、光ファイバー変位センサー、レーザー干渉計などがあります。
A12一軸センサーの場合、横方向感度とは、横方向の振動を受けたときのセンサーの電気出力と入力振動の比率を指します。これは周波数とセンサーの横方向の位置の関数です。
横方向感度比は、センサーの最大横方向感度と軸方向感度の比として表され、パーセンテージで表されます。
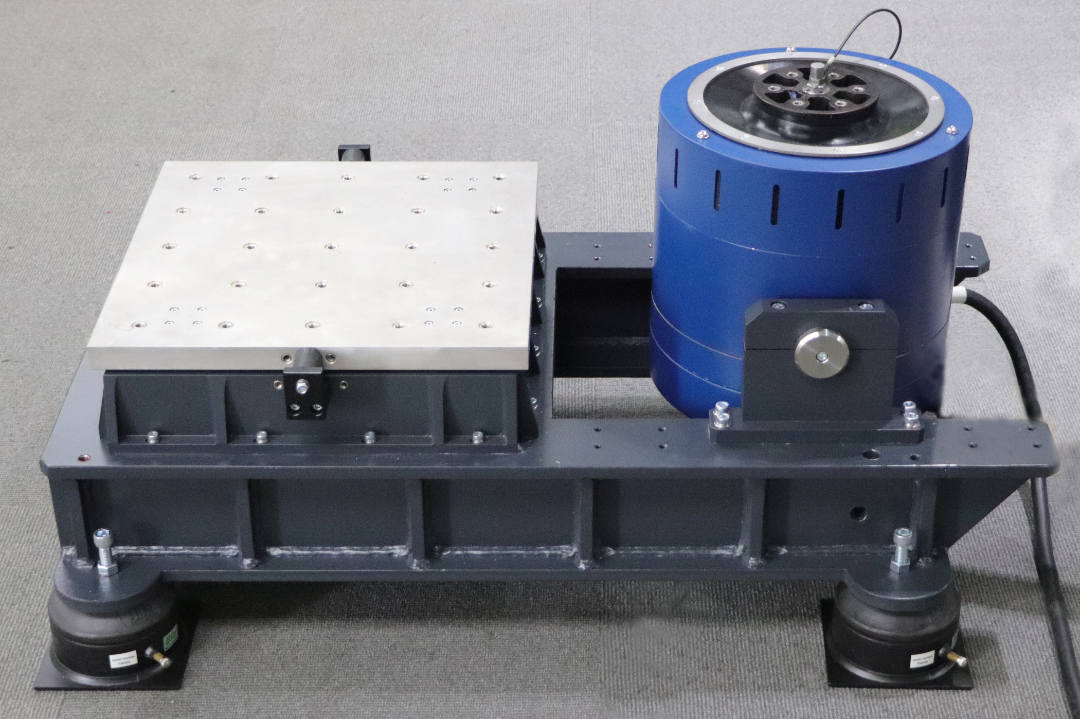
A13機械振動テーブルは、偏心質量の回転によって発生する慣性力、または偏心コネクティングロッドの動きによって発生する偏心モーメントによって励起されます。その主な特徴は、振動周波数が低い、周波数帯域が狭い、波形の歪みが大きい、磁気漏れがない、振幅調整が不便、自動周波数スキャンが難しいなどです。
電気力学的振動テーブルは、電流を流す導体が磁場内に電気力学的力を発生させるという原理によって励起されます。その主な特徴は、下限周波数が高く、帯域幅が広く、波形歪みが小さく、振幅調整と周波数調整が便利で、周波数を自動的にスイープできるものもありますが、テーブルには漏れ磁場が発生することが多く、コストが比較的高くなります。
A14同じ推力を持つ振動テーブルでクロスオーバー周波数が低いとは?
振動環境試験において、クロスオーバー周波数とは、振動特性量がある関係から別の関係に変化する周波数点を指します。たとえば、等変位-周波数関係が等速度-周波数関係に変化すると、クロスオーバー周波数が発生します。
推力は同じで、クロスオーバー周波数が低いため、耐荷重能力が大きい(M は大きくてもよい)か、変位振幅が大きいことを意味します。または広い周波数帯域を意味します。したがって、同じ推力の場合、クロスオーバー周波数が低いほど、テーブルのパフォーマンスが優れていることを意味します。
A15電動振動テーブルの永久磁石の磁石、励磁、コイル、磁気シリンダなどの固定部分と、可動コイル、サスペンションスプリング、テーブルトップなどの可動部分は、エアギャップによって互いに結合されています。エアギャップは小さいですが、非常に重要な役割を果たします。電気システムと機械システムを結合します。
エアギャップが小さすぎると、摩擦による損傷や波形の劣化が発生しやすくなるため、これは許容されません。エアギャップが大きすぎると、電気的結合が弱くなり、電気機械変換効率が低下します。したがって、エアギャップは清潔で乾燥している必要があります。圧縮空気の場合は、空気の流れが安定している必要があります。安定していないと、ノイズ、ドリフト、動き、波形の歪みが発生します。
A16振動台の低周波干渉とは、規定の振動波形に低周波かつ振幅の大きい振動が重畳される現象を指します。
低周波干渉が発生する原因は様々ですが、主に機械ガイド、伝動部の乾摩擦、機械テーブルの伝動プーリーによる共振などが原因で発生します。電気ステーションでは、50Hz 干渉によりクロストークが発生することがあります。したがって、機械テーブルの潤滑を増やし、電動テーブルのエアギャップを清潔に保ち、さまざまな機械的伝達干渉と50Hz電源干渉を減らします。低周波クロストークは通常は排除できます。
A17
1)試験要件に応じて厳しさレベルを選択し、関連規格に従って試験対象を設置します。
2)両側にクッションがある衝突テーブルの場合、クッションは校正時に厳しさレベルによって要求される順序で配置する必要があり、両側は 1 対 1 で対応している必要があります。
3)衝突テーブルの過酷度レベルが使用中に変化した場合、クッション層を交換した場合、または廃止する場合は、安全性に注意を払う必要があります。作業完了後は、クッション層への長期的な圧力や特性の変化を避けるために、衝突テーブル面を緩衝クッション層から分離する必要があります。
A18振動台の推力を一定に保ち、無負荷時と負荷時の加速度値をそれぞれ測定することで、振動台の能動システムの質量を判定できます。
具体的な方法:電動テーブルアンプの電流を一定に保ち、テーブルに負荷がかかっていないときとNキログラム(質量)が負荷されているときの加速度値A1とA2をそれぞれ測定します。能動システムの質量は、M=NA2/A1-A2(kg)です。
A19工学技術では、円運動する物体が単位時間あたりに回転する回数を回転速度と呼びます。
A20円運動する物体の単位時間あたりの角変位を平均角速度 (w) と呼びます。
A21回転速度の単位名は「回転数/分」、単位記号は「r/min」です。

*詳細はお気軽にお問い合わせください。